You may also want to check my Google Scholar profile!

N. Jaquier*, L. Rozo*, and T. Asfour. "Unraveling the Single Tangent Space Fallacy: An Analysis and Clarification for Applying Riemannian Geometry in Robot Learning", Intl. Conf. on Robotics and Automation (ICRA), 2024.
Paper
Paper
H. Beik-Mohammadi, S. Hauberg, G. Arvanitidis, N. Figueroa, G. Neumann, and L. Rozo. "Neural Contractive Dynamical Systems", Intl. Conference on Learning Representations (ICLR), 2024. Spotlight.
Paper
Paper

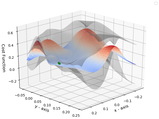
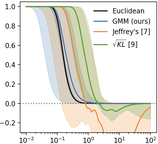
H. Ziesche* and L. Rozo*. "Wasserstein Gradient Flows for Optimizing Gaussian Mixture Policies". Neural Information Processing Systems (NeurIPS), 2023.
Paper
Paper

L. Rozo, A. G. Kupcsik, P. Schillinger, M. Guo, R. Krug, N. van Duijkeren, M. Spies, P. Kesper, S. Hoppe, H. Ziesche, M. Bürger, K. O. Arras. "The e-Bike Motor Assembly: Towards Advanced Robotic Manipulation for Flexible Manufacturing". Robotics and Computer-Integrated Manufacturing (RCMI), 2023.
Pre-print
Pre-print
H. Beik-Mohammadi, S. Hauberg, G. Arvanitidis, G. Neumann, and L. Rozo. "Reactive Motion Generation on Learned Riemannian Manifolds", Intl. Journal of Robotics Research (IJRR), 2023.
Pre-print
Pre-print

J. Zhang, H. Beik-Mohammadi, and L. Rozo. “Learning Riemannian Stable Dynamical Systems via Diffeomorphisms”. Conference on Robot Learning (CoRL), 2022.
PDF - Video
PDF - Video

A. Dhonthi, P. Schillinger, L. Rozo, and D. Nardi. “Optimizing Demonstrated Robot Manipulation Skills for Temporal Logic Constraints” IEEE International Conference on Intelligent Robots and Systems (IROS), 2022.
PDF
N. Jaquier, V. Borovitskiy, A. Smolensky, A. Terenin, T. Asfour, and L. Rozo. "Geometry-aware Bayesian Optimization in Robotics using Riemannian Matérn Kernels", Conference on Robot Learning (CoRL), 2021.
PDF - Code
PDF - Code
L. Rozo and V. Dave. Orientation Probabilistic Movement Primitives on Riemannian Manifolds, Conference on Robot Learning (CoRL), 2021.
PDF - Webpage
PDF - Webpage

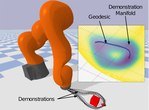
H. Beik-Mohammadi, S. Hauberg, G. Arvanitidis, G. Neumann, and L. Rozo. Learning Riemannian Manifolds for Geodesic Motion Skills, Robotics: Science and Systems (R:SS), 2021. (Best student paper award)
PDF - Webpage
PDF - Webpage

A. T. Le, M. Guo, N. van Duijkeren, L. Rozo, R. Krug, A. Kupcsik, and M. Bürger. Learning Forceful Manipulation Skills from Multi-modal Human Demonstrations, IEEE International Conference on Intelligent Robots and Systems (IROS), 2021.
PDF
A. Dhonthi, P. Schillinger, L. Rozo, and D. Nardi. Study of Signal Temporal Logic Robustness Metrics for Robotic Tasks Optimization, IROS Workshop: Benchmarking of robotic grasping and manipulation, 2021.
PDF
L. Fröhlich, L. Rozo, and M. Zeilinger. Kernel Design for Gaussian Mixture Models in Direct Policy Search. R:SS Workshop on Geometry and Topology in Robotics, 2021.
PDF

N. Jaquier and L. Rozo. High-Dimensional Bayesian Optimization via Nested Riemannian Manifolds, Neural Information Processing Systems (NeurIPS), 2020.
PDF - Code
PDF - Code
N. Jaquier, L. Rozo, D. G. Caldwell, and S. Calinon. Geometry-aware manipulability learning, tracking, and transfer, International Journal of Robotics Research (IJRR), 40:2-3, p.p. 624-650, 2021.
PDF - Webpage - Code
PDF - Webpage - Code
H. Beik-Mohammadi, L. Rozo, G. Neumann, and S. Hauberg. Riemannian Manifold Learning for Robot Motion Skills, IEEE/RSJ IROS Workshop: Bringing geometric methods to robot learning, optimization and control, 2020.
PDF
K. Ruschmeier, P. Schillinger, and L. Rozo. CMA-ES on Riemannian Manifolds for Optimizing Robotic Manipulation Tasks, IEEE/RSJ IROS Workshop : Bringing geometric methods to robot learning, optimization and control, 2020.
PDF

L. Rozo*, M. Guo*, A. G. Kupcsik*, M. Todescato, P. Schillinger, M. Giftthaler, M. Ochs, M. Spies, N. Waniek, P. Kesper, and M. Bürger. Learning and Sequencing of Object-Centric Manipulation Skills for Industrial Tasks, IEEE International Conference on Intelligent Robots and Systems (IROS), 2020.
PDF - Video
PDF - Video

N. Jaquier, L. Rozo, and S. Calinon. Analysis and Transfer of Human Movement Manipulability in Industry-like Activities, IEEE International Conference on Intelligent Robots and Systems (IROS), 2020.
PDF - Webpage
PDF - Webpage

Jaquier, N., Rozo, L., Calinon, S. and Buerger, M. (2019). Bayesian Optimization meets Riemannian Manifolds. Conference on Robot Learning (CoRL), Osaka, Japan, (Oral presentation - Best Paper Presentation Award).
PDF - Webpage - Code
PDF - Webpage - Code

Delhaisse, B., Rozo, L., and Caldwell, D. G. (2019). PyRoboLearn: A Python Framework for Robot Learning Practitioners. Conference on Robot Learning (CoRL), Osaka, Japan. (Best System Paper Runner-up Award)
PDF - Webpage - Code
PDF - Webpage - Code

Rozo, L. (2019). Interactive Trajectory Adaptation through Force-guided Bayesian Optimization. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau-China, pp. 7596-7603.
PDF
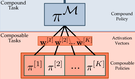
Esteban, D., Rozo, L., and Caldwell, D.G. (2019). Hierarchical Reinforcement Learning for Concurrent Discovery of Compound and Composable Policies. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau-China, pp. 1818-1825.
PDF - Webpage
PDF - Webpage

Silvério, J., Huang, Y., Abu-Dakka, F., Rozo, L., and Caldwell, D.G. (2019). Uncertainty-Aware Imitation Learning using Kernelized Movement Primitives, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau-China, pp. 90-97.
PDF

Rozo, L., Kupcsik, A., Guo, M., Todescato, M., Schillinger, P., Waniek, N., Giftthaler, M., and Buerger, M. Fast Learning and Sequencing of Object-centric Manipulation Skills, R:SS Workshop on Task-Informed Grasping (TIG-II): From Perception to Physical Interaction, Germany.
PDF

Huang, Y., Rozo, L., Silvério, J.,and Caldwell, D.G. (2019). Kernelized Movement Primitives. International Journal of Robotics Research (IJRR), 38:7, pp. 833-852 .
PDF - Video
PDF - Video

Huang, Y., Rozo, L., Silvério, J.,and Caldwell, D.G. (2019). Non-parametric Imitation Learning of Robot Motor Skills. IEEE International Conference on Robotics and Automation (ICRA), Montreal, Canada, pp. 5266-5272.
PDF - Video
PDF - Video

Silvério, J., Calinon, S. Rozo, L., and Caldwell, D.G. (2019). Learning Task Priorities from Demonstrations*. Transactions on Robotics, 35:1, pp. 76-94.
PDF - Video
* A previous version of this paper was uploaded to arXiv in 2017.
PDF - Video
* A previous version of this paper was uploaded to arXiv in 2017.
Esteban, D., Rozo, L., and Caldwell, D.G. (2018). Learning Deep Robot Controllers by Exploiting Successful and Failed Executions. IEEE/RAS International Conference on Humanoid Robots (Humanoids). Beijing, China. pp. 1087-1094 .
PDF - Video
PDF - Video

Silvério, J., Calinon, S. Rozo, L., and Caldwell, D.G. (2018). Bimanual Skill Learning with Pose and Joint Space Constraints. IEEE/RAS International Conference on Humanoid Robots (Humanoids). Beijing, China. pp. 153-159.
PDF - Video
PDF - Video

Abu-Dakka, F.J., Rozo, L., and Caldwell, D.G. (2018). Force-Based Learning of Variable Impedance Skills for Robotic Manipulation. IEEE/RAS International Conference on Humanoid Robots (Humanoids). Beijing, China. pp. 278-285.
PDF - Video
PDF - Video

Rolley-Parnell, E., Kanoulas, D., Laurenzi, A., Delhaisse, B., Rozo, L., Caldwell, D.G., and Tsagarakis, N. (2018). TelePose: A Teleoperation Robotic System based on External Range Sensing - Application on the Centaur-like Robot CENTAURO. IEEE/RSJ IROS Workshop: Human-Robot Cooperation and Collaboration in Manipulation: Advancements and Challenges, Madrid, Spain.
PDF - Video
PDF - Video

Rolley-Parnell, E., Kanoulas, D., Laurenzi, A., Delhaisse, B., Rozo, L., Caldwell, D.G., and Tsagarakis, N. (2018). Bi-manual Articulated Robot Teleoperation using an External RGB-D Range Sensor. IEEE International Conference on Control, Automation, Robotics and Vision (ICARCV), Singapore. pp. 298-304.
PDF - Video
PDF - Video

Abu-Dakka, F.J., Rozo, L., and Caldwell, D.G. (2018). Force-based Variable Impedance Learning for Robotic Manipulation. Robotics and Autonomous Systems, 109, pp. 156-167.
PDF - Video
PDF - Video

Silvério, J., Huang, Y., Rozo, L., and Calinon, S.. (2018). An Uncertainty-Aware Minimal Intervention Control Strategy Learned from Demonstrations. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, pp. 6065-6071.
PDF - Video
PDF - Video

Silvério, J., Huang, Y., Rozo, L., Calinon, S. and Caldwell, D.G. (2018). Probabilistic Learning of Torque Controllers from Kinematic and Force Constraints*. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, pp. 1-8.
PDF - Video
* A previous version of this paper was uploaded to arXiv in 2017.
PDF - Video
* A previous version of this paper was uploaded to arXiv in 2017.
Rozo, L., Ben Amor, H., Calinon, S., Dragan, A. and Lee, D. (2018). Special issue on robot learning for human-robot collaboration. Autonomous Robots, 42:5, pp. 953–956.
PDF

Jaquier, N.*, Rozo, L.*, Calinon, S. and Caldwell, D.G. (2018). Geometry-Aware Tracking of Manipulability Ellipsoids. Robotics: Science and Systems (R:SS), Pennsylvania, USA.
PDF - Video - Code
PDF - Video - Code

Jaquier, N., Rozo, L., and Calinon, S. (2018). Geometry-Aware Robot Manipulability Transfer. Learning and Inference in Robotics: Integrating Structure, Priors and Models (LAIR) Workshop at Robotics: Science and Systems Conference (R:SS), Pennsylvania, USA.
PDF

Huang, Y., Silvério, J., Rozo, L., and Caldwell, D.G. (2018). Hybrid Probabilistic Trajectory Optimization Using Null-Space Exploration. IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, pp. 7226-7232.
PDF - Video
PDF - Video

Huang, Y., Silvério, J., Rozo, L., and Caldwell, D.G. (2018). Generalized Task-Parametrized Skill Learning. IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, pp. 5667-5674.
PDF - Video
PDF - Video
Rozo, L., Jaquier, N., Calinon, S. and Caldwell, D.G. (2017). Learning Manipulability Ellipsoids for Task Compatibility in Robot Manipulation. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, Canada, pp. 3183-3189.
PDF - Code
PDF - Code

Peternel, L., Rozo, L., Caldwell, D., Ajoudani, A. (2017). A Method for Derivation of Robot Task-Frame Authority from Repeated Sensory Observations. Robotics and Automation Letters (RA-L), 2:2, pp. 719-726.
PDF - Video
PDF - Video
Delhaisse, B., Esteban, D., Rozo, L., and Caldwell, D.G. (2017). Transfer Learning of Shared Latent Space between Robots with Similar Kinematics Structure. IEEE International Joint Conference on Neural Networks (IJCNN), Anchorage, Alaska, pp. 4142-4149.
PDF
Rozo, L., Calinon, S., Caldwell, D., Jimenez, P. and Torras, C. (2016). Learning Physical Collaborative Robot Behaviors from Human Demonstrations. Transactions on Robotics, 32:3, pp. 513-527.
PDF - Video 1 - Video 2 - Code
PDF - Video 1 - Video 2 - Code

Rozo, L., Silvério, J. Calinon, S. and Caldwell, D. (2016). Learning Controllers for Reactive and Proactive Behaviors in Human-Robot Collaboration. Frontiers in Robotics and AI, 3:30, pp. 1-11.
PDF - Code
PDF - Code

Rozo, L., Silvério, J. Calinon, S. and Caldwell, D. (2016). Exploiting Interaction Dynamics for Learning Collaborative Robot Behaviors. International Joint Conference on Artificial Intelligence (IJCAI), Workshop on Interactive Machine Learning, New York - USA, pp. 1-7.
PDF - Code
PDF - Code

Rozo, L., Bruno, D., Calinon, S. and Caldwell, D.G. (2015). Learning Optimal Controllers in Human-robot Cooperative Transportation Tasks with Force and Position Constraints. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, pp. 1024-1030.
PDF - Video
PDF - Video

Silvério, J., Rozo, L., Calinon, S. and Caldwell, D.G. (2015). Learning Bimanual End-effector Poses from Demonstrations using Task-Parameterized Dynamical Systems. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, pp. 464-470.
PDF - Video
PDF - Video

Rozo, L., Calinon, S. and Caldwell, D.G. (2014). Learning Force and Position Constraints in Human-robot Cooperative Transportation. IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Edinburgh, Scotland, UK, pp. 619-624.
PDF - Video
PDF - Video

Rozo, L., Jimenez, P. and Torras, C. (2013). A Robot Learning from Demonstration Framework to Perform Force-based Manipulation Tasks. Intelligent Service Robotics, 6:1, pp. 33-51.
PDF - Video 1 - Video 2
PDF - Video 1 - Video 2

Rozo, L., Calinon, S., Caldwell, D., Jimenez, P. and Torras, C. (2013). Learning Collaborative Impedance-based Robot Behaviors. AAAI Conference on Artificial Intelligence, Washington-USA, pp. 1422-1428.
PDF - Video
PDF - Video

Rozo, L., Jimenez, P. and Torras, C. (2013). Force-based Robot Learning of Pouring Skills using Parametric Hidden Markov Models. IEEE-RAS International Workshop on Robot Motion and Control (RoMoCo), Wasowo-Poland, pp. 227-232.
PDF - Video
PDF - Video

Pardo, D., Rozo, L., Alenya, G. and Torras, C. (2012). Dynamically Consistent Probabilistic Model for Robot Motion Learning. International Conference on Intelligent Robot Systems (IROS), Workshop on Learning and Interaction in Haptic Robots, Vilamoura-Portugal, pp. 1-6.
PDF - Video
PDF - Video

Rozo, L., Jimenez, P. and Torras, C. (2011). Robot Learning from Demonstration of Force-based Tasks with Multiple Solution Trajectories. 15th International Conference on Advanced Robotics (ICAR), Tallin-Estonia, pp. 124-129.
PDF - Video
PDF - Video
Rozo, L., Jimenez, P. and Torras, C. (2011). Robot Learning from Demonstration in the Force Domain. International Joint Conference on Artificial Intelligence (IJCAI), Workshop on Agents Learning Interactively from Human Teachers, Barcelona-Spain, pp. 1-6.
PDF

Rozo, L., Jimenez, P. and Torras, C. (2010). Learning Force-Based Robot Skills from Haptic Demonstration. 13th International Conference of the Catalan Association for Artificial Intelligence (CCIA), Tarragona-Spain, pp. 331-340.
PDF
Rozo, L., Jimenez, P. and Torras, C. (2010). Sharpening Haptic Inputs for Teaching a Manipulation Skill to a Robot. 1st International Conference on Applied Bionics and Biomechanics (ICABB), Venice-Italy, pp. 370-377.
PDF

Rozo, L., Jimenez, P. and Torras, C. (2009). Robot learning of container-emptying skills through haptic demonstration. Technical Report IRI-TR-09-05, Institut de Robotica i Informatica Industrial IRI, CSIC-UPC.
PDF
